Se dice que un sistema cualquiera, mecánico, eléctrico, neumático, etc. es un oscilador armónico si cuando se deja en libertad, fuera de su posición de equilibrio, vuelve hacia ella describiendo oscilaciones sinusoidales, o sinusoidales amortiguadas en torno a dicha posición estable.
 La masa colgada del resorte forma un oscilador armónico.
La masa colgada del resorte forma un oscilador armónico.
El ejemplo típico es el de una masa colgada a un resorte. Cuando se aleja la masa de su posición de reposo, el resorte ejerce sobre la masa una fuerza que es proporcional al desequilibrio (distancia a la posición de reposo) y que está dirigida hacia la posición de equilibrio. Si se suelta la masa, la fuerza del resorte acelera la masa hacia la posición de equilibrio. A medida que la masa se acerca a la posición de equilibrio y que aumenta su velocidad, la energía potencial elástica del resorte se transforma en energía cinética de la masa. Cuando la masa llega a su posición de equilibrio, la fuerza será cero, pero como la masa está en movimiento, continuará y pasará del otro lado. La fuerza se invierte y comienza a frenar la masa. La energía cinética de la masa va transformándose ahora en energía potencial del resorte hasta que la masa se para. Entonces este proceso vuelve a producirse en dirección opuesta completando una oscilación.
Si toda la energía cinética se transformase en energía potencial y viceversa, la oscilación seguiría eternamente con la misma amplitud. En la realidad, siempre hay una parte de la energía que se transforma en otra forma, debido a la viscosidad del aire o porque el resorte no es perfectamente elástico. Así pues, la amplitud del movimiento disminuirá más o menos lentamente con el paso del tiempo. Se empezará tratando el caso ideal, en el cual no hay pérdidas. Se analizará el caso unidimensional de un único oscilador (para la situación con varios osciladores, véase movimiento armónico complejo).
Contenido
* 1 Casos
o 1.1 Oscilador armónico sin pérdidas
o 1.2 Oscilador armónico amortiguado
+ 1.2.1 Oscilador sobreamortiguado
+ 1.2.2 Oscilador con amortiguamiento crítico
+ 1.2.3 Oscilador con amortiguamiento débil
# 1.2.3.1 Factor de calidad Q
o 1.3 Oscilaciones forzadas
o 1.4 Respuesta en frecuencia
o 1.5 Oscilador forzado y caos
* 2 Importancia en Física
* 3 Ejemplos
o 3.1 Circuito LC
+ 3.1.1 Circuito LC sin pérdidas
+ 3.1.2 Circuito LC con pérdidas
+ 3.1.3 Oscilaciones forzadas de un circuito LC con pérdidas
* 4 Oscilador armónico cuántico
* 5 Véase también
* 6 Referencias
o 6.1 Bibliografía
* 7 Enlaces externos
Casos
Oscilador armónico sin pérdidas
Artículo principal: Movimiento armónico simple
Se denominará m a la masa e y a la distancia entre la posición de la masa y la posición de equilibrio. Se supondrá que la fuerza del resorte es estrictamente proporcional al desequilibrio: F=-ky (ley de Hooke). F es la fuerza y k} la constante elástica del resorte. El signo negativo indica que cuando y es positiva la fuerza está dirigida hacia las y negativas.
La segunda ley de Newton nos dice:
F=ma=m{dv/ dt}=m{d^2y/ dt^2}
remplazando la fuerza obtenemos:
m{d^2y/dt^2}= -ky
La solución de esta ecuación diferencial ordinaria es inmediata: las únicas funciones reales (no complejas) cuya segunda derivada es la misma función con el signo invertido son seno y coseno. Las dos funciones corresponden al mismo movimiento. Escogemos arbitrariamente "coseno". La solución se escribe:
 La curva de arriba da la posición del oscilador en función del tiempo. La del medio da la velocidad. Abajo están las curvas de las energías. En azul está la energía cinética {{1/ 2}mv^2} y en rojo la energía potencial del resorte {{1/ 2}ky^2}
La curva de arriba da la posición del oscilador en función del tiempo. La del medio da la velocidad. Abajo están las curvas de las energías. En azul está la energía cinética {{1/ 2}mv^2} y en rojo la energía potencial del resorte {{1/ 2}ky^2}
y = A\cos(\omega t + \phi)\,
* \scriptstyle{A} es la amplitud, que depende de las condiciones iniciales.
* \scriptstyle{\omega=2\pi f} es la pulsación (o frecuencia angular) y \scriptstyle{f} la frecuencia.
* \scriptstyle{t} es el tiempo.
* \scriptstyle{\phi} es la fase inicial (para \scriptstyle{t= 0}).
Es fácil comprobar que el valor de \scriptstyle{\omega} es:
\omega=\sqrt{{k\over m}}
El período de oscilación es:
T=2\pi\sqrt{{m\over k}}
Como ya hemos dicho, durante un cuarto de una oscilación la energía potencial se transforma en energía cinética. Durante otro cuarto, la energía cinética se transforma en energía potencial. En la figura de la derecha se ha trazado la posición en función del tiempo (curva de arriba), la velocidad en función del tiempo (en medio) y las energías potenciales y cinéticas (abajo).
Oscilador armónico amortiguado
Oscilador armónico con amortiguador. La fuerza viscosa es proporcional a la velocidad.
Añadiendo pérdidas de energía, se consigue modelar una situación más próxima a la realidad. Así, nótese que la oscilación descrita en el apartado anterior se prolongaría indefinidamente en el tiempo (la sinusoide que describe la posición no converge a cero en ningún momento). Una situación más verosímil se corresponde con la presencia de una fuerza adicional que frena el movimiento. Esa fuerza puede ser constante (pero siempre con signo tal que frene el movimiento). Es el caso de rozamientos secos: la fuerza no depende ni de la velocidad ni de la posición. Otra situación que se produce en la realidad es que la fuerza sea proporcional a la velocidad elevada a una potencia, entera o no. Así sucede cuando la fuerza que frena proviene de la viscosidad o de las pérdidas aerodinámicas. Se tratará únicamente el caso más simple, es decir, cuando la fuerza sea proporcional a la velocidad. En este caso la fuerza será:
F_f=-bv=-b{dy\over dt}
Donde \scriptstyle{b} es un coeficiente que mide el amortiguamiento debido a la viscosidad. Si \scriptstyle{b} es pequeño, el sistema está poco amortiguado. Nótese el signo negativo que indica, como antes, que si la velocidad es positiva, la fuerza tiene la dirección opuesta a la velocidad. Con este término complementario la ecuación diferencial del sistema es:
m{d^2y\over dt^2}=-ky-b{dy/ dt}
Se trata de una ecuación diferencial ordinaria, lineal, de segundo orden[1] (contiene derivadas segundas) y homogénea (no hay término independiente de y). Tiene tres tipos de soluciones según el valor de \scriptstyle{b^2-4km}:
* Si \scriptstyle{b^2-4km > 0} el sistema está sobreamortiguado (amortiguamiento fuerte o supercrítico)
* Si \scriptstyle{b^2-4km = 0} el sistema tiene amortiguamiento crítico.
* Si \scriptstyle{b^2-4km <>
Oscilador sobreamortiguado 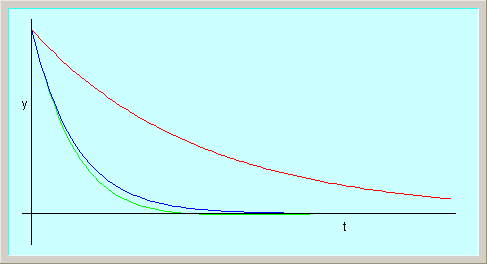
Posición en función del tiempo de un oscilador armónico amortiguado.
curva azul: amortiguamiento crítico.
curva roja: amortiguamiento doble que el crítico.
curva verde: amortiguamiento igual a 90% del amortiguamiento crítico.
En este caso el sistema no es realmente un oscilador, ya que no oscila. La solución es de la forma:
y = A_1e^{\lambda_1 t}+ A_2e^{\lambda_2 t}
donde los coeficientes de las exponenciales son menores que cero y reales (por lo que no hay oscilación):
\lambda_1={-b -\sqrt{b^2-4km} \over 2 m}
y
\lambda_2={-b +\sqrt{b^2-4km} \over 2 m}
\scriptstyle{A_1} y \scriptstyle{A_2} dependen de las condiciones iniciales (es decir, de la situación del sistema para \scriptstyle{t = 0}). La posición no es oscilante y tiende hacia la posición de equilibrio de manera asintótica. Las dos exponenciales decrecientes de las soluciones tienen constantes de tiempo diferentes. Una es pequeña \scriptstyle{1/\lambda_1} y corresponde a la rápida cancelación del efecto de la velocidad inicial. La segunda \scriptstyle{1/\lambda_2} es más grande y describe la lenta tendencia hacia la posición de equilibrio.
Oscilador con amortiguamiento crítico
Este caso es el límite entre un sistema oscilante y uno no oscilante. Ocurre cuando
b^2=4km\,
La solución única es:
y = A_1e^{-{b\over 2m}t}+ A_2te^{-{b\over 2m}t}
como antes, \scriptstyle{A_1} y \scriptstyle{A_2} son constantes que dependen de las condiciones iniciales.
El amortiguamiento crítico corresponde a la tendencia más rápida hacia la situación de equilibrio cuando no sobrepasa esa posición. Si se disminuye un poco el amortiguamiento el sistema se acerca más rápidamente de la posición de equilibrio, pero sobrepasando la posición (oscila en torno a ese punto, tomando valores positivos y negativos).
Oscilador con amortiguamiento débil

Oscilaciones amortiguadas. La amplitud de la sinusoide está controlada por la exponencial.
En este caso, que es más interesante, tenemos un oscilador que oscila alrededor de la posición de equilibrio con amplitud decreciente. Sucede cuando:
b^2<4km\,
La solución es:
y = Ae^{-{b\over 2m}t}\cos(\omega t + \phi)
como antes, \scriptstyle{A} y \scriptstyle{\phi} son constantes que dependen de las condiciones iniciales. La pulsación es:
\omega= \sqrt{{k\over m}-\left({b\over 2m}\right)^2}
La pulsación del sistema amortiguado es un poco menor que la pulsación del sistema no amortiguado \scriptstyle{\omega_\circ= \sqrt{{k\over m}}} porque la fuerza que lo amortigua, frena la masa y la retarda.
La oscilación del sistema está descrita por una sinusoide de frecuencia \scriptstyle{f= {1\over 2\pi}\sqrt{{k\over m}-\left({b\over 2m}\right)^2}} cuya amplitud está multiplicada por una exponencial decreciente cuya constante de tiempo es \scriptstyle{\tau={2m\over b}}.
Factor de calidad Q
En un sistema poco amortiguado es interesante de definir el factor de calidad (Quality factor en inglés) o simplemente Q como:
Q={\sqrt{km}\over b}
esta cantidad es igual a \scriptstyle{2\pi} veces el inverso de las pérdidas relativas de energía por período. Así, un sistema que pierde 1% de energía a cada ciclo, tendrá un Q de 628. Más interesante, Q es también \textstyle{\pi} veces el número de oscilaciones que el sistema hace mientras su amplitud se divide por un factor \textstyle{e}. Si se puede aceptar una aproximación más grosera, Q es 3 veces el número de oscilaciones que un sistema hace mientras su amplitud cae a 1/3 de la amplitud inicial.
Como ejemplos, el Q de un vehículo con los amortiguadores en buen estado es un poco más grande que 1. El Q de una cuerda de guitarra es de varios miles. El Q de los cristales de cuarzo utilizados en electrónica como referencia de frecuencia es el orden de 1 millón. Una copa de vidrio ordinario tiene un Q mucho más pequeño que una copa de vidrio de plomo (cristal).
Oscilaciones forzadas
Podemos poner en movimiento un oscilador armónico sacándolo de su posición de equilibrio y abandonándolo a su oscilación libre (ver párrafos precedentes). También se puede poner en movimiento aplicándole una fuerza variable con el tiempo. Se tratará solo el caso en el cual la fuerza varía de manera sinusoidal con el tiempo.
En esta situación, la ecuación diferencial lineal es inhomogénea. La solución a este tipo de ecuación está formada por dos términos: la solución general del sistema homogéneo más una solución particular del caso inhomogéneo.[2] Por tanto, la solución está formada por dos partes, una parte transitoria (que se anula pasado cierto tiempo), similar a las que vimos en los párrafos precedentes, más una parte estacionaria. La solución de la parte transitoria es la misma la que ya hemos visto (ecuación homogénea). Las únicas diferencias son las condiciones iniciales y finales, que no son idénticas. Vamos a interesarnos a la solución estacionaria. En la ecuación diferencial del sistema hay que añadir la fuerza sinusoidal:
m{d^2y\over dt^2} + b{dy\over dt}+ky=F_m\cos(\omega t)
Para resolver esta ecuación es más interesante utilizar el mismo método que en electricidad y electrónica. Para ello, se añade a la fuerza real una fuerza imaginaria\scriptstyle{ jF_m\sin(\omega t)}. Como en electrónica, se utiliza \scriptstyle{j=\sqrt{-1}} en lugar de i. Ahora la ecuación a resolver es:
m{d^2y\over dt^2} + b{dy\over dt}+ky=F_me^{j\omega t}
Pero por supuesto, como en electricidad, sólo la parte real de y será de interés. La solución es inmediata:
y=Ae^{j\omega t}\,
Si se deriva esta expresión y se sustituye en la ecuación diferencial, se encuentra el valor de A:
A={F_m \over k-m\omega^2+jbm\omega}
Pero A puede escribirse como \scriptstyle{A=\rho e^{j\phi}} y la solución de \scriptstyle{y} compleja es:
y=\rho e^{j\phi} e^{j\omega t}=\rho e^{j\left(\omega t+\phi\right)}
El valor de \scriptstyle{y} real es la parte real de la expresión precedente:
y=\rho \cos\left(\omega t+\phi\right)
donde \scriptstyle{\rho} es el módulo de \scriptstyle{A} y \scriptstyle{\phi} su argumento:
\rho=\mbox{Re}(A)=\mbox{Re}\left( {F_m \over k-m\omega^2+jbm\omega} \right) = {F_m (k-m\omega^2)\over (k-m\omega^2)^2 +b^2m^2\omega^2}
\phi=\arg\left(A\right)=\arg\left( {F_m \over k-m\omega^2+jbm\omega} \right)
Como en electricidad, el ángulo \scriptstyle{\phi} da el desfase del movimiento con respecto a la fuerza externa. Si \scriptstyle{\phi} es positivo, el movimiento está en avance de fase y si \scriptstyle{\phi} es negativo el movimiento está en retardo de fase. En este caso el desfase será siempre negativo.
Respuesta en frecuencia
La amplitud de las oscilaciones forzadas dependerá, por supuesto, de la amplitud de la fuerza externa. Pero para una misma amplitud de la fuerza, la amplitud de la oscilación dependerá también de la frecuencia. Veamos como varia la amplitud \scriptstyle{\rho} con \scriptstyle{\omega}. Utilizando la definición de frecuencia propia del sistema (sin amortiguamiento ni fuerza externa):

Respuesta en frecuencia de un oscilador armónico. A la frecuencia de resonancia, la amplitud es Q veces más grande que a muy baja frecuencia.
\omega_\circ=\sqrt{{k\over m}}
se puede escribir:
A={F_m\over k}{1\over 1-\left({\omega\over\omega_o}\right)^2 +j{\omega\over\omega_o}\sqrt{{b^2\over km}}}
Si además se utiliza la definición de \scriptstyle{Q={\sqrt{km}\over b}}, se obtiene:
A={F_m\over k}{1\over 1-\left({\omega\over\omega_o}\right)^2+j{\omega\over\omega_o}{1\over Q}}
En el dibujo de derecha se ha representado la amplitud de la oscilación forzada en función de la frecuencia para varios valores del factor de calidad Q. A muy baja frecuencia la amplitud es la misma que si la fuerza fuese estática \scriptstyle{F_m=kA}, y el sistema oscilará entre las posiciones \scriptstyle{{F_m\over k}} y \scriptstyle{-{F_m\over k}}. Cuando la frecuencia aumenta, la amplitud también, alcanzando un máximo cuando la frecuencia de excitación es igual a la frecuencia propia del sistema. A esa frecuencia propia también se le llama frecuencia de resonancia. También se dice que un sistema excitado a una frecuencia próxima a la frecuencia de resonancia "resuena" o "entra en resonancia". A la frecuencia de resonancia, la amplitud de las oscilaciones será Q veces más grande que la que se obtiene en baja frecuencia.
El ancho del pico de resonancia a media altura, es decir cuando la amplitud es igual a la mitad del máximo, es igual a la frecuencia de resonancia dividida por Q. Ese ancho también se llama banda pasante.
Oscilador forzado y caos
El oscilador armónico no perturbado en una dimensión es un ejemplo de sistema integrable, con comportamiento regular. Sin embargo, el oscilador armónico perturbado puede presentar un comportamiento caótico[3] caracterizado por un atractor extraño. Por ejemplo en el caso de una perturbación de tipo x^3\; la ecuación de movimiento es:
\frac{d^2x}{dt^2} + a\frac{dx}{dt} + \omega^2 x + \varepsilon\omega^2 x^3 = b \cos(\omega t)
Este sistema es no integrable y el movimiento tiende rápidamente hacia el llamado atractor de Duffing.[4]
Importancia en Física
Considérese el caso de un cuerpo sometido a una fuerza unidimensional: F(y). Desarrollando dicha fuerza en serie de Taylor alrededor del punto de equilibrio (y = 0):
F(y)=F(y=0)+y\left ( \frac{dF}{dy} \right )_{y=0}+{1\over 2}y^2\left ( \frac{d^2F}{dy^2} \right )_{y=0}+...
Como el origen es el punto de equilibrio, el primer término del desarrollo es nulo. Si las oscilaciones en torno a y = 0 son lo suficientemente pequeñas, uno se puede quedar con la aproximación lineal y despreciar los términos de orden superior:
F(y)\simeq \ y\left ( \frac{dF}{dy} \right )_{y=0}
Llamándole k a la derivada de la fuerza, se obtiene de nuevo la fuerza recuperadora de Hooke. Aquí radica la importancia del oscilador armónico: supone una primera aproximación para el estudio de un sistema cuando se producen pequeñas oscilaciones en torno a su posición (o estado) de equilibrio.[5]
Ejemplos
Circuito LC
Circuito LC sin pérdidas
Circuito LC sin pérdidas.
En la figura de la derecha se ha dibujado un circuito oscilante LC ideal, es decir sin pérdidas.
Supóngase que, en la situación inicial, el condensador está cargado a una tensión V y que en ese momento se conecta la inductancia. La tensión presente en las extremidades de la inductancia va a hacer aparecer una corriente de sentido inverso a la de la flecha del dibujo, que aumentará con el tiempo. A medida que el condensador suministra corriente a la inductancia, se descarga y la tensión disminuye. La disminución de la tensión hace que la corriente aumente menos rápidamente. La situación continua así, con la tensión del condensador que disminuye cada vez más rápidamente (porque la corriente aumenta) y la corriente que aumenta más lentamente (porque la tensión disminuye). Llega un momento en el cual el condensador está completamente descargado y la corriente ha llegado a un máximo. Ahora la corriente continúa circulando porque la inductancia se lo impone. El condensador comienza a cargarse en el otro sentido y hace aparecer una tensión en los bornes de la inductancia que hace disminuir la corriente. La situación continúa del siguiente modo: el condensador se va cargando cada vez más lentamente (porque la corriente disminuye), mientras que la corriente va disminuyendo cada vez más rápidamente (porque la tensión inversa aumenta). Así, se llega a la situación en la cual la corriente se anula y la tensión del condensador es máxima y del mismo valor que la tensión inicial, pero con sentido opuesto. La situación es análoga a la de una masa sostenida por un resorte. La inductancia juega el papel de la masa. La masa tiene inercia e impide que el movimiento cambie bruscamente. La inductancia impide que la corriente cambie bruscamente. Veamos las ecuaciones.
El comportamiento eléctrico del condensador está descrito por la ecuación: \scriptstyle{I=C{dV\over dt}}. El de la inductancia está descrito por \scriptstyle{V=L{dI\over dt}}. Como en el esquema \scriptstyle{I} es positivo cuando sale del lado positivo de la inductancia, hay que agregar un signo negativo: \scriptstyle{V=-L{dI\over dt}}. Se tiene, pues, este sistema de ecuaciones diferenciales:
I=C{dV\over dt}
V=-L{dI\over dt}
Para eliminar \scriptstyle{I}, basta derivar la primera ecuación, para remplazar la derivada de I en la segunda:
V=-LC{d^2V\over dt^2}
que se puede escribir como:
L{d^2V\over dt^2}=-{1\over C}V
Esta ecuación es la misma que la de la masa con un resorte. \scriptstyle{V} es equivalente a la posición \scriptstyle{y}. \scriptstyle{L} es equivalente a la masa \scriptstyle{m} y \scriptstyle{{1\over C}} es equivalente a la constante del resorte \scriptstyle{k}.
La solución es:
V=V_\circ\cos(\omega t + \phi)
con
\omega = {1\over \sqrt{LC}}
Como de costumbre, \scriptstyle{V_\circ} y \scriptstyle{\phi} dependen de las condiciones iniciales.
Circuito LC con pérdidas
Circuito LC con pérdidas. La resistencia da cuenta de todas la perdidas posibles.
El esquema de la derecha representa un circuito oscilante LC con pérdidas. Las pérdidas están representadas por las pérdidas en una resistencia. En un circuito real, las pérdidas provienen de resistencias en serie como la dibujada. Dichas resistencias pueden estar en el exterior de la inductancia o del condensador, pero también pueden ser resistencias internas de esos componentes. También puede haber resistencias en paralelo, perdidas en el dieléctrico del condensador o en el núcleo de la bobina (si es ferromagnético). También puede haber pérdidas por radiación de ondas electromagnéticas. La resistencia hará que la tensión sobre la bobina sea diferente de la tensión sobre el condensador. La corriente creada será menor que si no hubiese habido pérdidas y cuado la corriente cargue de nuevo el condensador, la tensión a la cual llegará será menor. Por su parte, la amplitud disminuirá y tenderá hacia cero. La ecuación del nuevo sistema es:
L{d^2V\over dt^2}+R{dV\over dt}+{1\over C}V = 0
La ecuación es la misma que la de una masa con un resorte y con un amortiguador. Esta vez \scriptstyle{R} es el equivalente del coeficiente de rozamiento \scriptstyle{b}. La solución es:
V=V_\circ e^{-{R\over 2L}t}\cos(\omega t + \phi)
con
\omega = \sqrt{{1\over LC}-\left({R\over 2L}\right)^2}
y
Q = \sqrt{L \over RC}={\omega_\circ L \over R}= {R \over \omega_\circ C}
donde \scriptstyle{\omega_\circ={1\over \sqrt{LC}}} es la frecuencia propia del circuito (sin pérdidas).
Oscilaciones forzadas de un circuito LC con pérdidas
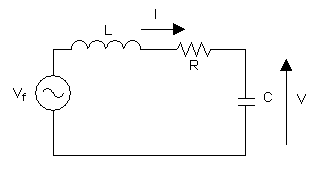
Circuito LRC atacado por un generador sinusoidal.
El esquema de la derecha muestra un generador conectado a un circuito LC en serie. Si la tensión del generador es \scriptstyle{V_f\cos(\omega t)}, la ecuación es:
LC{d^2V \over dt^2}+RC{dV \over dt} + V = V_f\cos(\omega t)
La expresión se puede reescribir, dándole un aspecto similar a las formas precedentes:
L{d^2V \over dt^2}+R{dV \over dt} + {1\over C}V = {V_f \over C}\cos(\omega t)
Como en el ejemplo mecánico, en régimen estacionario la solución es:
V=V_\circ\cos(\omega t + \phi)
donde
V_\circ = V_f\left|{1 \over 1 - \left({\omega\over \omega_\circ}\right)^2 + j{1\over Q}{\omega\over \omega_\circ}}\right|
y
\phi = Arg\left({1 \over 1 - \left({\omega\over \omega_\circ}\right)^2 + j{1\over Q}{\omega\over \omega_\circ}}\right)
\scriptstyle{\omega_\circ} y \scriptstyle{Q} son los mismos que en el párrafo precedente. La amplitud de la tensión de salida es máxima a la resonancia (cuando \scriptstyle{\omega=\omega_\circ}) y vale \scriptstyle{Q} veces la tensión de entrada.
Oscilador armónico cuántico
Artículo principal: Oscilador armónico cuántico
Funciones de onda para los primeros seis autoestados, n = 0 a 5. El eje horizontal muestra la posición y en unidades (h/2πmω)1/2. Las gráficas están sin normalizar.

Densidades de probabilidad de los primeros autoestados (dimensión vertical, con los de menor energía en la parte inferior) para las diferentes localizaciones espaciales (dimensión horizontal).
Obtenido de: http://es.wikipedia.org/wiki/Oscilador_arm%C3%B3nico
Tirso Ramírez
CRF
No hay comentarios:
Publicar un comentario